Les Logiciels pour le LiDAR, les principaux formats et algorithmes
Système d'information du territoire neuchâtelois - SGRF - Etat de Neuchâtel
Les logiciels de visualisation
Web pointcloud viewer
| Nom | Description | Avantages | Inconvénients |
|
(TU Wien - Autriche) |
La solution de visualisation de nuages de points développée par Markus Schuetz (chercheur au TU Vienne - computer vision) est la plus efficace au monde pour diffuser de gigantesques volumes de données : centaines de milliards de points, terrabytes de données. Performances inégalées à ce jour. De nombreux logiciels commerciaux se basent sur potree (Flai, Pointly, Vercator), Lidar360, Vision Lidar 360, Kickthemap, etc.
Démo géoportail SITN : https://sitn.ne.ch/lidar 300 milliards de points
Utilisation intensive au SITN Le SITN contribue à son évolution sur les concepts et sur le financement |
|
|
|
(Hobu - USA) |
Solution de visualisation du format cloud optimized pointcloud développé par Hobu (qui a développé COPC). Tout le relevé LiDAR USA peut être accédé en format COPC avec ce viewer ou Potree
Démo : https://usgs.entwine.io/ |
|
|
|
(Bentley - USA) |
Cesium est une plateforme 3D proche de Google earth. Elle permet d'intégrer toutes sortes de données 3D, images, vecteurs et pointcloud sur un globe virtuel. C'est un des système les plus utilisés au monde. Ils ont des collaborations avec les plus grands groupes : Google, Unreal, Unity, ... Cesium a récememment été racheté par Bentley, un autre mastodonte de la 3D. |
|
|
|
(Oslandia - France) |
Un framework polyvalent pour visualiser les données géospatiales dans le navigateur, dont des nuages de points. |
|
|
Desktop pointcloud viewer
| Nom |
Description |
Avantages | Inconvénients |
| Potree desktop (TU Wien - Autriche) |
Potree Desktop est exactement le même produit que Potree Web mais compilé pour fonctionner sur PC ou MAC en version standalone. Ce produit est un phénoménal viewer extrêmement efficace. On peut visualiser des données en local (drag&drop de fichiers dans le viewer) ou sur internet. Il supporte la visualisation de centaines de milliards de points |
|
|
| Nubigon (Nubigon - USA) |
Nubigon est un super outil de visualisation. Il offre plus de fonctions de visualisation que d'analyse. Il permet de faire de superbes rendus et animations de nuages de points et les combiner avec d'autres types de données |
|
|
| Fugro Viewer (Fugro - USA) |
Fugro Viewer est un visualisateur gratuit (pas open source) très simple et pratique de nuages de points |
|
|
| Trimble Connect (Trimble - USA) |
Trimble connect est un visualisateur assez puissant de données 3D dont les nuages de points qui peuvent être combinées avec des données CAO, 3D, ... Pour les nuages de points, Trimble connect utilise le format Potree. |
|
Les logiciels spécialisés de traitement LiDAR
| Nom | Description | Avantages | Inconvénients |
| Terrascan (Terrasolid - Finlande) |
Terrascan est certainement la solution de traitement de nuages de points la plus complète du marché. Terrascan est développé depuis > 30 ans. La plupart des grands producteurs de données et grands comptes utilisent Terrascan pour gérer et traiter les données LiDAR. Il offre une palette inégalée de fonctions, de très nombreux algorithmes de classification et segmentation. Pour LiDAR aérien, mobile et nuages de points photogrammétriques.
Produit principal du SITN pour gérer et traiter ses données LiDAR depuis 20 ans. |
|
|
| Cloudcompare (France) | Développé dans le cadre d'une thèse de doctorat, le produit a continué de bien se développer depuis de nombreuses années. Il est particulièrement apprécié pour sa richesse fonctionnelle. |
|
|
| LaserData (Autriche) | LaserData offre une panoplie très riche et complète de produits pour gérer, traiter, analyser les données LiDAR. C'est basé sur le moteur SIG SAGA GIS. |
|
|
| LasTools (Rapidlasso - Allemagne) |
Lastools est une suite de programmes exécutables complète avec 55 modules qui couvrent la compression, la conversion, la classification, le filtrage, la génération DTM-DSM et autres produits, le pre-processing, le contrôle qualité et la visualisation. Les modules peuvent être achetés séparément ou en bloc, voir site internet pour la liste des prix. Une partie des modules sont open source. Laslook est une nouvelle interface visuelle pour compléter ou faciliter l'utilisation en lignes de commandes. |
|
|
| Orbit (Bentley - USA) |
Orbit était un produit développée par une société Belge spécialisée dans le traitement des données LiDAR mobile. Solution extrêmement riche et complète. Bentley a racheté Orbit et intègre désormais cela dans son portfolio pour les nuages de points Pas utilisé au SITN, juste assisté à quelques démos. |
|
|
| Topodot (Topodot - USA) |
Solution extrêmement complète pour traiter des données LiDAR et en extraire automatiquement des informations. Très spécialisé sur le traitement de données du LiDAR mobile pour les besoins routiers. Basé sur Microstation de Bentley Pas utilisé au SITN, juste assisté à quelques démos. |
|
|
| LP360 (LP360 - USA) |
Solution extrêmement complète pour traiter des données LiDAR et en extraire automatiquement des informations. Développé depuis 2006. Existe en standalone ou intégré dans ArcGIS, QGIS. Pas utilisé au SITN, juste assisté à quelques démos. |
|
|
| Lidar360 (GreenValley International - Chine) |
Solution extrêmement complète pour traiter des données LiDAR et en extraire automatiquement des informations. Une version est spécialisé sur le traitement de données du LiDAR mobile pour les besoins routiers et une autre sur les données du LiDAR aérien. Pas utilisé au SITN, juste assisté à quelques démos. |
|
|
| Leica Cyclone 3DR (Leica - Allemagne) |
Solution extrêmement complète pour traiter des données LiDAR et 3D et en extraire automatiquement des informations. Pas utilisé au SITN, juste assisté à quelques démos et testé les versions d'évaluation. Très utilisé par les bureaux de géomètres |
|
|
Logiciels spécialisés en mode IA et Cloud
| Nom |
Description |
Avantages | Inconvénients |
| Flai (Flai, Slovénie) |
Plateforme cloud et IA assez bluffante pour traiter, classifier, segmenter les nuages de points. Le SITN a largement utilisé Flai pour le rapid mapping LiDAR après la tempête de la Chaux-de-Fonds : classification automatique, détection des troncs, etc. A noter que la visualisation se base sur Potree |
|
|
| Pointly |
Plateforme concurrent de Flai
Pas testé par le SITN mais semble proposer les mêmes fonctions |
|
|
Support du LiDAR dans les logiciels de SIG courants
| Nom |
Description |
Avantages | Inconvénients |
| QGIS (Open Source World) |
QGIS est le leader des logiciels SIG open source. Son développement de ces dernières années a été phénoménal. Depuis quelques années, suite à 3 campagnes de crowdfunding (auxquelles le SITN a activement participé) le support des pointclouds est devenu très riche est intéressant. C'est développé par North Road - Nyall Dawson (NZ), Lutra Consulting (UK) et Hobu (US - COPC, pdal) SITN utilise de plus en plus. Nous avons 400 postes installés sur Qqis pour l'administration. |
|
Je cherche |
| QGIS Whitebox LiDAR extension plugin |
Excellent plugin complémentaire pour QGIS Offre de nombreuses fonctions d'analyses des nuages de points, essentiellement en mode grilles. Fonctions issues de la recherche. |
|
|
| QGIS Relief Visualization toolbox |
Excellent plugin complémentaire pour QGIS. Offre des algorithmes de visalusation qu'on ne trouve nulle part ailleurs (ombrage archéologique) C'est pour travailler avec des données LiDAR en mode grille (raster) |
|
|
| ArcGis pro (ESRI - USA) | Leader mondial dans les SIG propriétaire, ArcGis pro offre de nombreuses fonctions pour intégrer et travailler avec des données LiDAR. Permet de faire des cartographies de haute qualité. Intégration complète SIG, LiDAR, 3D, BIM, etc. |
|
|
Support du LiDAR dans les logiciels de CAO-DAO courants et logiciels 3D
| Nom |
Description |
Avantages | Inconvénients |
| Rhino (Rhinoceros - USA et plugin Rhinoterrain, RhinoCity, RhinoSolar, RhinoPointcloud - France) |
Rhino est un des nouveaux leaders dans le domaine de la CAO 3D et la conception paramétrique. Il permet de faire de la modélisation avancée et des rendus impressionnants. Rhinoterrain a développé 4 plugins pour Rhino dont Rhinoterrain et Rhinopointcloud pour intégrer au mieux les nuages de points dans le moteur Rhino. |
|
|
| Microstation, Itwin Capture, Cesium (Bentley - USA) |
MicroStation est un puissant outil de création de modèle 2D ou 3D, paramétrique ou non. De nombreux logiciels LiDAR sont basés sur le moteur Microstation (Terrascan, Topodot, ...). Par ailleurs Bentley propose une gamme impressionnante de solutions pour travailler avec des nuages de points dont la suite Itwin et Orbit. Par ailleurs Bentley a racheté Cesium ce qui les place très bien en matière de publication 3D |
|
|
| Autocad, Recap, Revit (Autodesk - USA) |
Un ou sinon le leader dans le monde de la CAO - Autocad et BIM - Revit, on ne présente plus Autodesk. Recap est leur solution pour le traitement des nuages de points |
|
|
| Blender (World) |
Blender est un des logiciels 3D les plus puissants du marché. Il est open source. Il est utilisé aussi bien pour des rendus d'images que faire des films d'animation complets. Il y a de plus en plus d'utilisateurs SIG qui utilisent Blender pour faire des rendus impressionnants à partir de données LiDAR Le SITN utilise beaucoup blender pour les MNT, MNS, calculs d'occlusion ambiantes, rendus cartographiques |
|
|
Les librairies
| Nom | Description | Avantages | Inconvénients |
| LidR |
lidR est un librairie R pour la manipulation et la visualisation de données de balayage laser aéroporté (ALS), avec un accent sur la recherche et le développement pour les applications forestières et écologiques. Le package est entièrement open source et est intégré dans l'écosystème géospatial R. |
|
|
| Pdal.io (Hobu Inc - USA) : |
PDAL est une bibliothèque C++ permettant de traduire et de manipuler des données de nuages de points. Elle ressemble beaucoup à la bibliothèque GDAL qui gère les données matricielles et vectorielles. |
|
|
| Digital forestry Toolbox (Matthew Parkan - CH) | La Digital Forestry Toolbox (DFT) est une collection de fonctions et de tutoriels pour Matlab/Octave conçus pour faciliter l'analyse des données de télédétection relatives aux forêts. |
|
|
Les formats pointclouds indispensables
Voici les 3 formats, à mon sens, les plus importants. Ce sont des standards incoutournables. Si votre logiciel ne les supporte pas, changez de logiciel
| Nom |
Description |
Avantages | Inconvénients |
| LAS |
Cette spécification définit un format ouvert qui permet à différents outils matériels et logiciels LIDAR de générer des données dans un format commun. C'est un standard de fait C'est un standard (norme) du consortium OGC (Open geospatial Consortium) |
|
|
| LAZ | Ce format a été développé par le regretté Martin Isenburg qui est aussi l'origine des produits LasTools. C'est la version comprimée (sans perte) du format LAS. Il permet un facteur de compression d'environ 5. Ce format largement utilisé depuis 2012 est en voie de LAZ OGC |
|
|
| COPC - cloud optimzed pointcloud (basé LAZ) |
Ce format est un format LAZ cloud optimisé, indexé pour améliorer les performances de visualisation. Il a été développé par la société Hobu Inc. Toutes les données du SITN ont été converties dans ce format qui permet à la fois l'archivage efficace et la visualisation performante. C'est le format privilégié par QGIS. |
|
|
| COG - cloud optimized Geotif (extension du Geotif) |
Un Cloud Optimized GeoTIFF (COG) est un fichier GeoTIFF normal mais qui peut être hébergé sur un serveur de fichiers HTTP, avec une organisation interne qui permet des flux de travail plus efficaces sur le cloud. Pour ce faire, il exploite la capacité des clients qui émettent des requêtes HTTP GET à demander uniquement les parties d'un fichier dont ils ont besoin. Il peut aussi parfaitement bien être utilisé en local à la place d'un GeoTIFF standard. . Il permet de gérer des photos aériennes et des données LiDAR (MNT, MNS, MNC) et de très gros volumes 1 TB sans problème. |
|
|
Les algorithmes les plus importants et les plus "cool"
| Nom | Utilité | Avec | Sans |
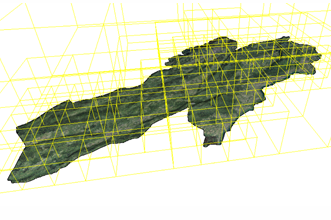
| Voxel indexation : visualisation efficace (Potree) de milliards de points |
Permet de générer une indexation 3D (en général des voxels) pour une visualisation très performantes, indépendantes des volumes de données.
démo sur géoportail du SITN |
 |
 |
| Eye-dome-lightning ou occlusion ambiante : ombrage des points pour une meilleure représentation |
Ces 2 algorithmes permettent de faire ressortir la 3D d'un nuage de points en intégrant un ombrage ou une occlusion ambiante - lancé de rayons (souvent simplifiée)
démo sur géoportail du SITN |
|
|
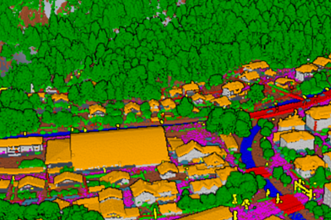
| Classification – Classification proposée par Terrascan ou IA : regroupement par catégorie : sol, végétation, bâtiments, ... |
La classification des données LiDAR consiste à regrouper les points par classes : sol, végétation, toits, façades, lignes aériennes., voitures. Les algorithmes sont soit classique, en utilisant la géométrie, intensité des points ou sur des algorithmes de type IA.
Le logiciel le plus avancé pour la classification standard est terrascan. La prochaine version va intégrer l'IA.
Les challengers sont les logiciels FLAI, Pointly plutôt basé platerforme cloud et IA. démo sur géoportail du SITN |
 |
|
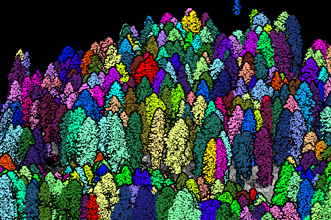
| Segmentation – regroupement de points par objets |
La segmentation consiste à regrouper les points non plus seulement par classe cf. ci-dessus mais par objet, par exemple associé les points végétation à chaque arbre démo sur géoportail du SITN |
 |
 |
| Keypoints : réduction intelligente du nombre de points | Les nuages de points sont souvent très volumineux. Il existe de nombreux algorithmes de réduction de nombre de points. Le plus efficace pour les points sol est l'algorithme Keypoints qui ne garde que les points caractéristiques pour une tolérance de précision de MNT souhaité. C'est utile pour calculer des meshs de terrain ou des courbes de niveaux. |  |
 |
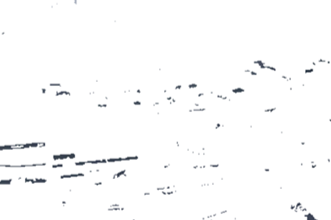
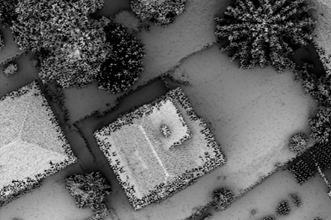
| Spikefree DSM |
Permet de générer un MNS de qualité sans artefacts pour les bords de toits de bâtiments ou les arbres.
|
 |
 |
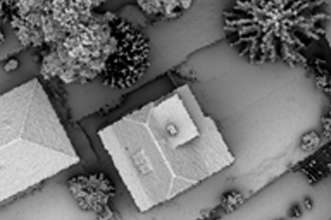
| Ombrage par occlusion ambiante |
L'ombrage des MNT, MNS, MNC peut se faire avec les algorithmes classiques mais les résultats sont bien plus intéressants avec des ombrages plus sophistiqués
|
 |
|
| Pointcloud colorization : coloriser le nuage de points à partir de clichés orientés (ou ortho mais pas conseillé) |
La colorisation d'un nuage de points n'est pas systématique mais est très utile pour la visualisation. Il faut idéalement coloriser avec des clichés orientés et non à partir des orthophotos pour éviter les artefacts sur les objets verticaux.
|
 |
|
| Object ou feature extraction : extraction d’objets par IA | L'extraction automatisées d'objets et une phase suivant la classification et la segmentation. L'objectif est de créer des objets vectoriels à partir du nuages de points : bâtiments, panneaux signalisation, voitures, arbres, etc. | 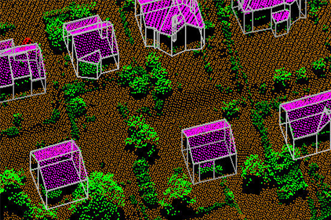 |
|
| Cycles rendering : rendus cartographiques | Le moteur de rendu cycles intégré dans plusieurs logiciels de 3D (Blender, Rhino, Twinmotion) permet de faire des sorties spectaculaires | 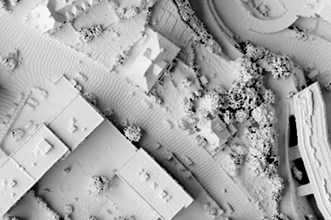 |
|
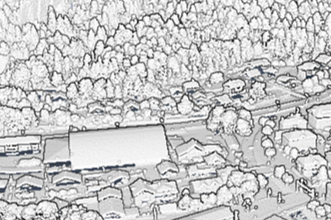
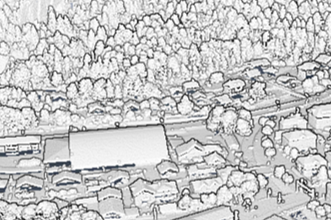
| EEVE rendering et deep paint dans blender |
Le moteur de rendu EEVE utilisé par exemple dans Blender permet de faire des rendus très graphiques et plaisant, ce que j'appelle le LiDART !
|
|


Vous souhaitez m'envoyer des commentaires, des corrections, des logiciels, formats ou algorithmes complémentaires. Je prends volontiers vos retours: marc.riedo@ne.ch - responsable du SITN